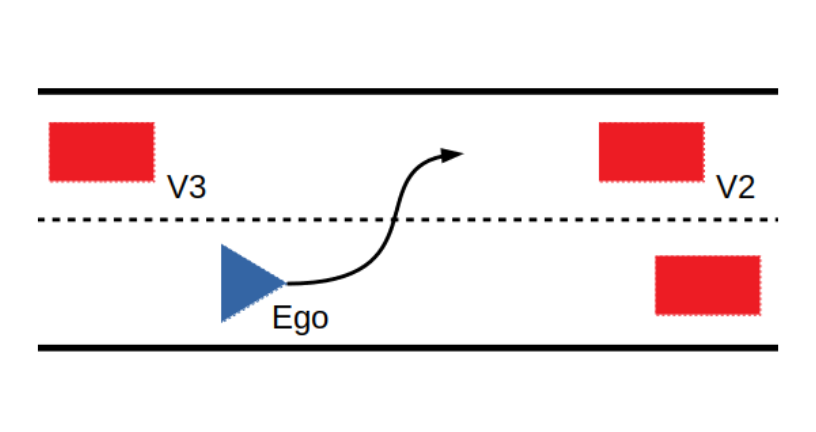
Build a lane change decision model with Compact Support Neural Network
One of the biggest obstacles in deploying Autonomous Vehicle (AV) is that without vehicle-to-vehicle communication, AV has to be able to predict human driver’s intentions and planning and control its action accordingly, while equally importantly, AV also has to behave just like a typical human driver such that other road users can infer the AV’s intentions. We propose to learn the human driver’s mental model in lane change decision making.